IoT Development:開発事例
IoT開発の分断をなくす
組込み×クラウド一気通貫
理学療法士向け歩行リハビリ用ウェアラブルロボットの制御基板の設計を含む組込みシステムからクラウド・モバイルアプリまでのシステム開発一式を担当しました。歩行訓練・リハビリ支援ロボットのソフトウェア開発事例です。
組込みソフトによる歩行動作のセンシングからクラウドでのデータ管理・動作解析、モバイルアプリでのリハビリ効果表示まで、一気通貫で対応しています。
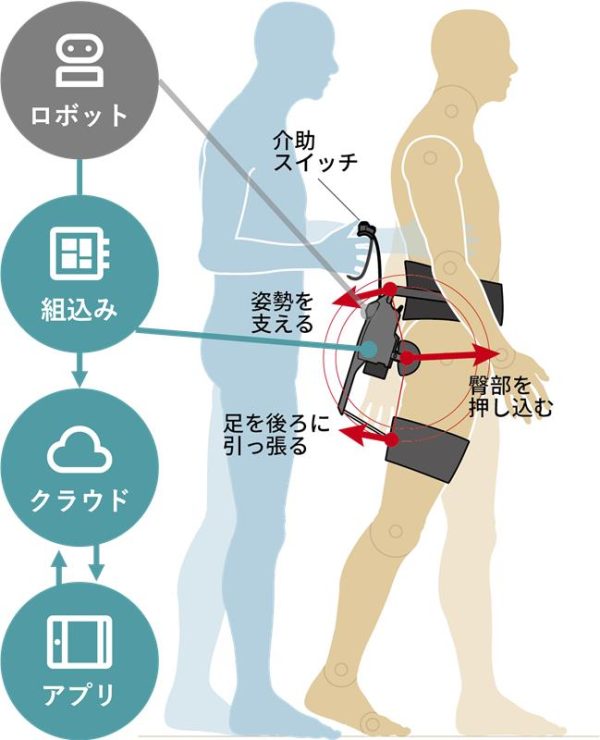
システム構成図
ロボット
- ウェアラブルデバイス設計
- 歩行補助アクチュエータ制御
組込みソフト
- エッジデバイス開発
- 歩行動作センシング
クラウド
- データ管理・動作解析
- サーバレスAWSインフラ
アプリ
- リハビリ効果表示
- マルチプラットフォーム
株式会社INOMER(ロボット)と株式会社メタテクノ(ソフトウェア)が共同開発しています。
導入効果
- 1特定の理学療法士に限らず、リハビリを再現可能
- 2毎回の結果を数値で評価し、リハビリ効果を可視化
年間採択枠 4件
技術要素
- ウェアラブル/エッジデバイス開発
- 運用コストを最小限に抑えたサーバレスAWSインフラ構築
- モバイルアプリのマルチプラットフォーム開発
担当フェーズ
- 要件定義
- 基本設計、詳細設計
- 単体、結合テスト
- 保守
※本ウェアラブルロボットは医療機器には該当しません。リハビリ支援を目的としたシステムですが、医療行為の代替を保証するものではありません。ご利用にあたっては担当の理学療法士・医師の指導のもとでご使用ください。